Boston Robot Hackers is a community-driven organization dedicated to fostering innovation, learning, and collaboration in the field of robotics. We bring together enthusiasts, professionals, students, and makers who share a passion for building intelligent machines and pushing the boundaries of what's possible with robotics. (Request an invite to join us!)
Next Main Meeting: August 06, 2026 at 7:00pm | Next Hands-On Meeting: August 19, 2026 at 6:00pm
What's New
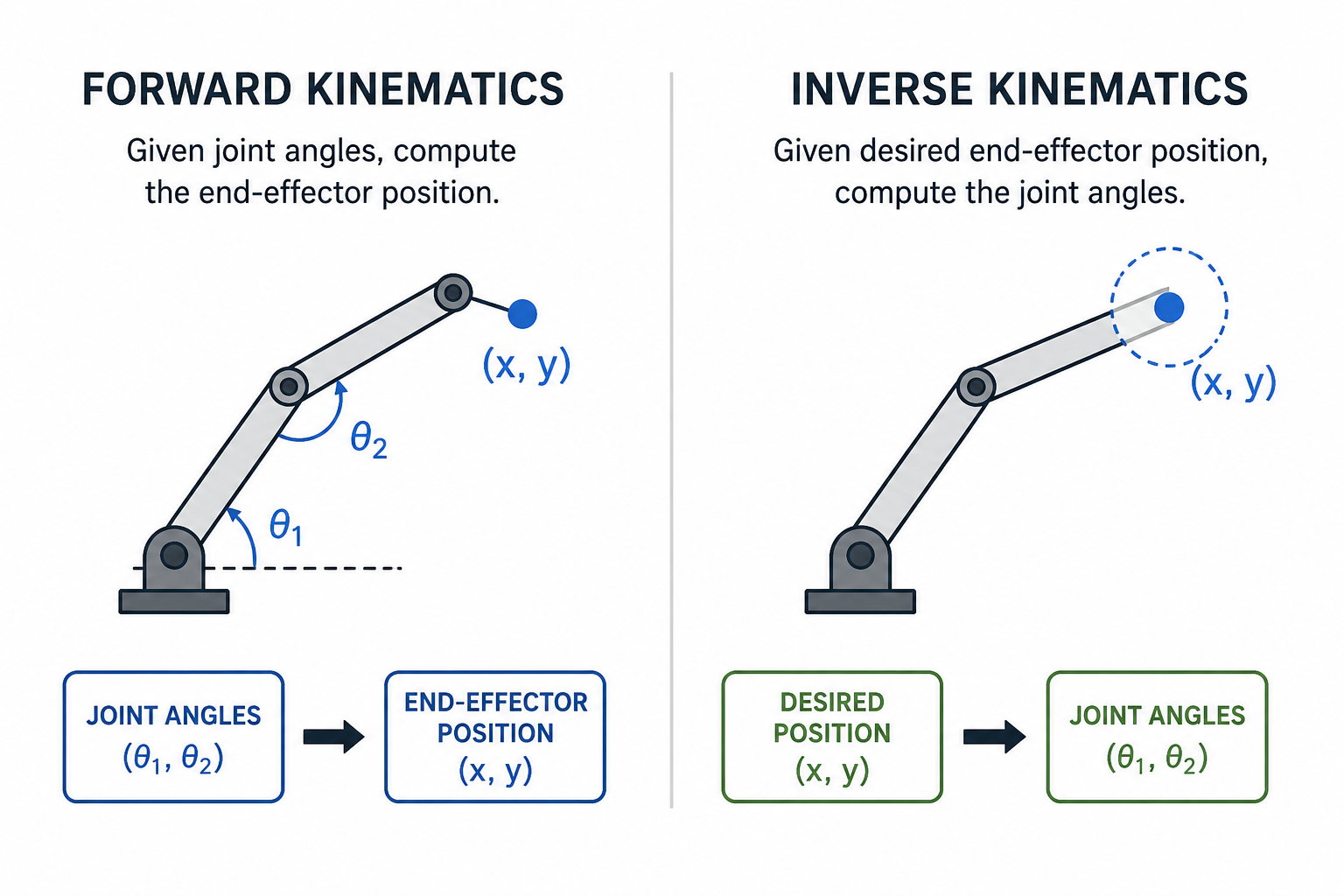
Aug 6: Shivam Chopra: Forward and Inverse Kinematics
Shivam is a Senior Medical Device Engineer and Subsystem Technical Lead at Dexcom, where he works on next-generation wearable platforms. Every robotic arm faces the same two fundamental questions: given these joint angles, where is the end-effector? (forward kinematics) — and the harder one: given a target, what joint angles get me there? (inverse kinematics). The math behind both questions is something every roboticist eventually has to reckon with, and this talk is a ground-up walk through it.
posted on: August 06, 2026

July 9: Isaac Vandor talk about maritime robotics
Isaac Vandor is the developer and maintainer for the software running on famous underwater vehicles like Alvin and AUV Sentry. Isaac will talk about his work and experiences with underwater maritime robotics.
posted on: July 09, 2026

June 11: Ankush Dhawan: Meet Pupper, the Open-Source Robot Dog
Ankush is a PhD candidate in Robotics at Stanford University. Meet Pupper: an open-source quadruped robot built at Stanford that can walk, see, listen, and respond to the world around it. Born as a student project and now in its third generation, Pupper has become the centerpiece of Stanford's CS123 course, a teaching platform for AI-enabled robotics, and through the Dr. Pupper project at Stanford Medicine, a companion for children recovering in the hospital.
posted on: June 11, 2026

May 7: Adam Ring talk about simulation
Adam Ring will give the talk about simulation in robotics. In this talk, Adam will discuss how the right simulation approach can accelerate development, improve safety, and reduce costly real-world failures.
posted on: April 04, 2026
Meeting Report: Chris Lai on Kalman Filters
Chris Lai and the team from gave a rapidfire talk teaching us about Kalman Filters. Kalman filters are a constant source of confusion. No one doubts their value but it's easy to get lost in trying to understand the math or the right way to use them.
posted on: April 04, 2026
September 3: Alan Kilian talk: Powering Robots
Alan Kilian, a long time software and hardware person with a lifelong passion for Robotics will speak about aspects of power for robots. Batteries, Measurement, Circuitry and more.
posted on: February 27, 2026
Meeting announcement for March 5: Tom Ryder on current trends in Robotics
We are fortunate to have Tom Ryden, Executive Director of Mass Robotics as our speaker this month. Tom will discuss current trends in Robotics Startups and the industry in general
posted on: January 31, 2026
Meeting announcement for April 2: Kalman Filters
Chris Lai leads the Beaver Works Summer Program at MIT. Chris will discuss the motivation behind the Kalman Filter, and describe why (and most importantly) how it is used.
posted on: January 30, 2026
Meeting announcement for January 8 - URDF and Vibe Coding
Monthly Meeting Announcement January 8 at A2
posted on: December 15, 2025
Meeting notes from December main meeting
Thoughts about our December meeting
posted on: December 13, 2025
Meeting Announcement for December 11 at 7:00pm
Featured Talk: Joel Grimm and Christopher Lai will introduce us to the Autonomous RACECAR at MIT's Beaver Works Summer Institute
posted on: December 11, 2025
Introducing Hands-On Meetings!
Hands-on meetings are coming, starting on Oct 23. The usual place and time. Some of us will bring some partial robots or other widgets from our workshops and if you acquire a robot or robot kit before and want help building it or debugging it, bring it along. It will be a two hour meeting, without an agenda!
posted on: September 24, 2025
Upcoming Meetings
All meetings at Artisans Asylum, 96 Holton Street, Allston
|
06 Aug
2026
7:00pm
|
Main Meeting
Shivam Chopra (one of our members) will give a talk about Forward and Inverse Kinematics. Especially for people working with robot arms this is a very important thing to understand. There is some math involved by Shivam promises that no one will get hurt :)
|
|
19 Aug
2026
6:00pm
|
Hands-On Meeting
These meetings have no agenda or speaker. Just hacking together. Beginners welcome!
|
|
03 Sep
2026
7:00pm
|
Main Meeting
Alan Kilian, a long time software and hardware person with a lifelong passion for Robotics will speak about aspects of power for robots. Batteries, Measurement, Circuitry and more.
|
|
09 Sep
2026
6:00pm
|
Hands-On Meeting
These meetings have no agenda or speaker. Just hacking together. Beginners welcome!
|
🛠️ Projects (see all)
Current community initiatives
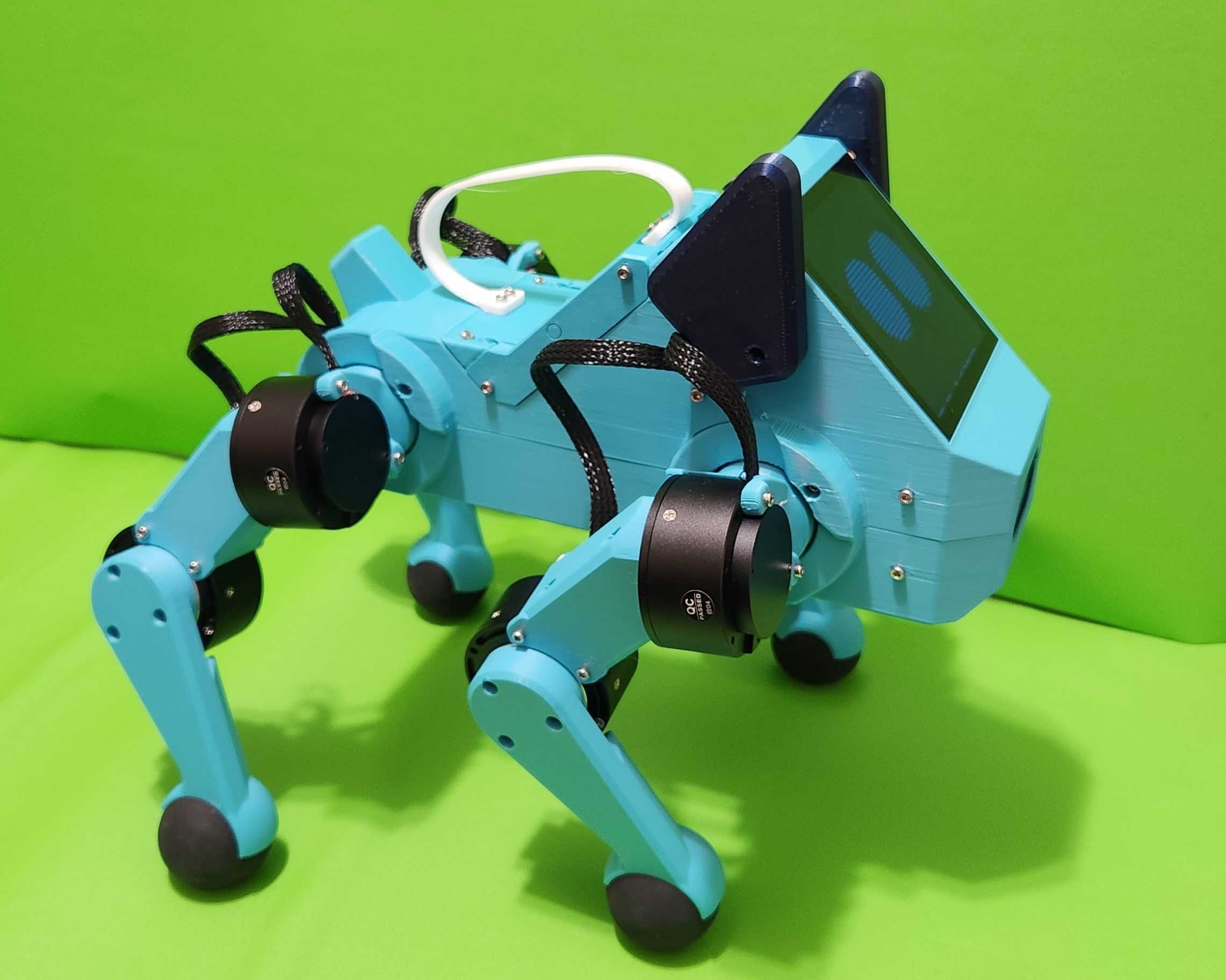
Stanford Pupper v3 x Boston Robot Hackers
Open-source quadruped robot built at Stanford that can walk, see, listen, and respond to the world around it. Born as a student project and now in its third generation, Pupper has become the centerpiece of Stanford's CS123 course, a teaching platform for AI-enabled robotics, and through the Dr. Pupper project at Stanford Medicine, a companion for children recovering in the hospital.
Status: New
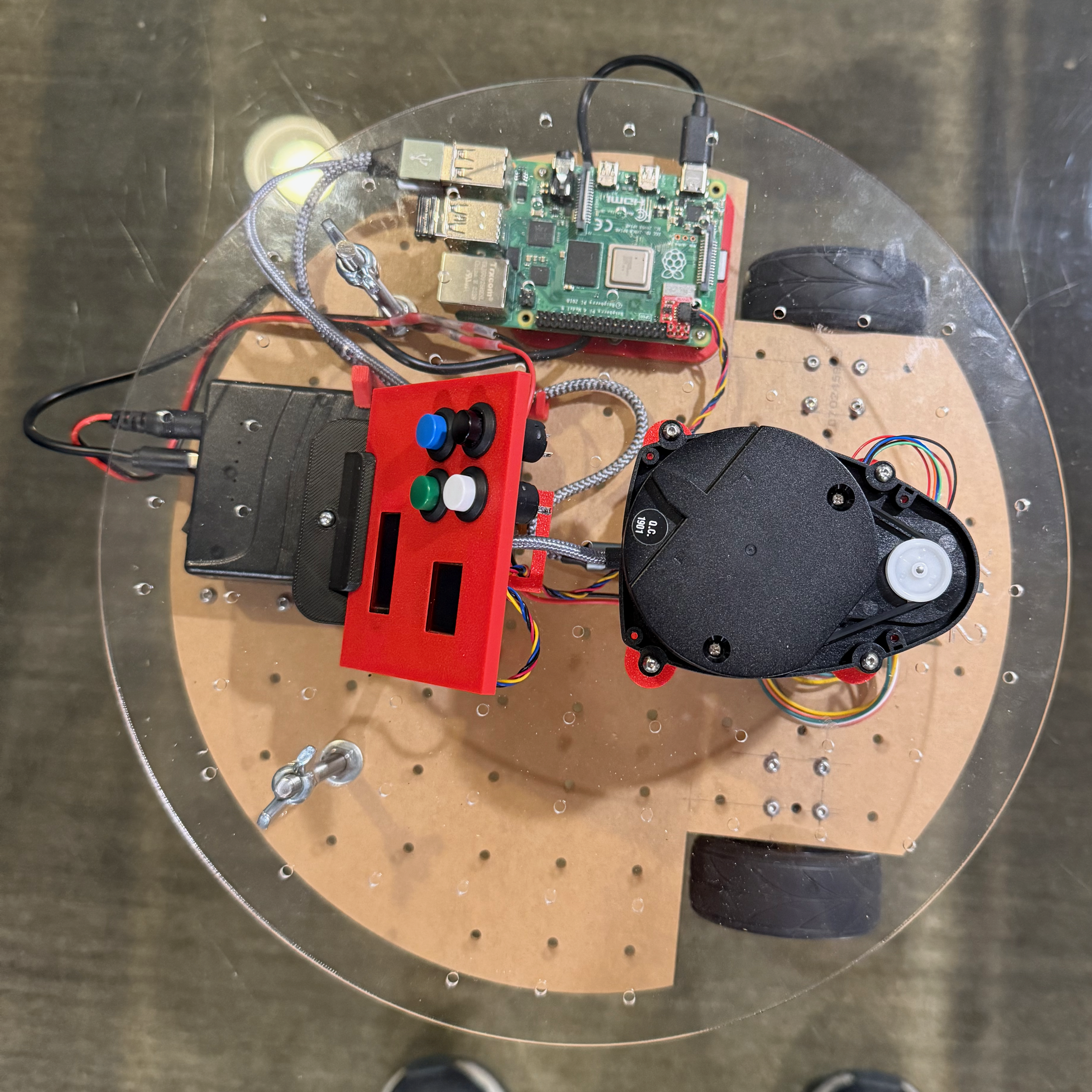
Dome ROBOT
A small simple differential drive robot built from scratch with no external help. Built with ROS2 and Linorobot2
Status: initial testing

iRobot Create-II
An iRobot Create-II (Roomba 960) controlled by a Raspberry PI and a Sick LASER scanner. Built with ROS2.
Status: initial testing

Access Ability Arm
A UFactory arm coupled with a custom gripper and associated computer vision code facilitating operator use
Status: testing

ROYGBIV bot
Based on the Turtlebot2i, with custom 3d printed rainbow colored plates, 2 cameras, and a gripper.
Status: Needs update to ROS2
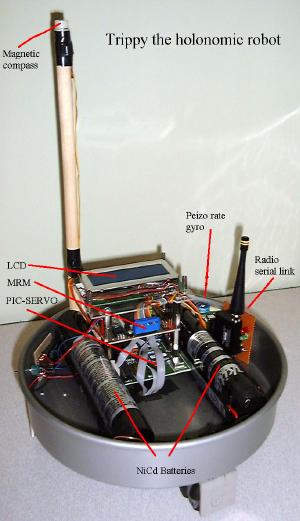
Trippy
A holonomic robot based on the Killough platform used for my Mechatronics BS degree from the U of Minnesota.
Status: Retired
