Stanford Pupper v3 x Boston Robot Hackers
Open-source quadruped robot built at Stanford that can walk, see, listen, and respond to the world around it. Born as a student project and now in its third generation, Pupper has become the centerpiece of Stanford's CS123 course, a teaching platform for AI-enabled robotics, and through the Dr. Pupper project at Stanford Medicine, a companion for children recovering in the hospital.
Overview
The Boston Robot Hackers are thrilled to announce a collaborative initiative with the Stanford Pupper Project to build and deploy the Pupper v3—a cutting-edge, open-source quadruped robot designed for research, education, and community engagement.
This project brings together the technical rigor of Stanford University's Computer Science Department and the vibrant, multi-disciplinary talent of the Boston robotics community. Our goal is to assemble, program, and enhance this agile robot dog right here in Boston, serving as a hands-on learning platform for engineers, students, and hobbyists alike.
What is Pupper v3?
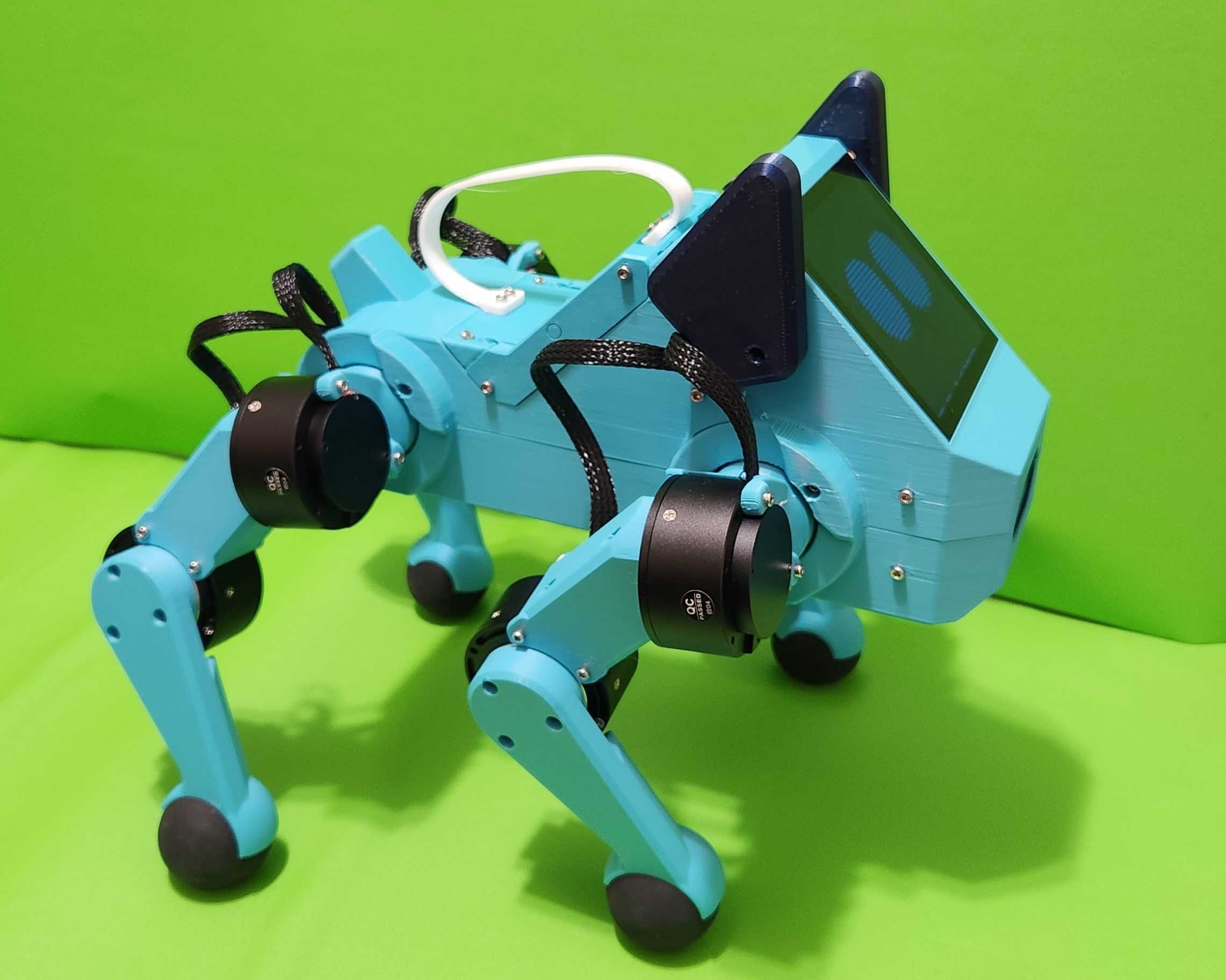
Pupper v3 is more than just a robot; it is a "cute companion" designed to spark joy while teaching the fundamentals of robotics and Artificial Intelligence. Developed through years of curriculum instruction at Stanford, it represents the state-of-the-art in accessible robotics.
Key Features
- AI-Powered Interaction: Integrated with the OpenAI Realtime API, Pupper can listen, process, and respond to natural language.
- Advanced Sensing: Equipped with Vision Language Models (VLMs), cameras, microphones, and proprioception to perceive and interact with its environment.
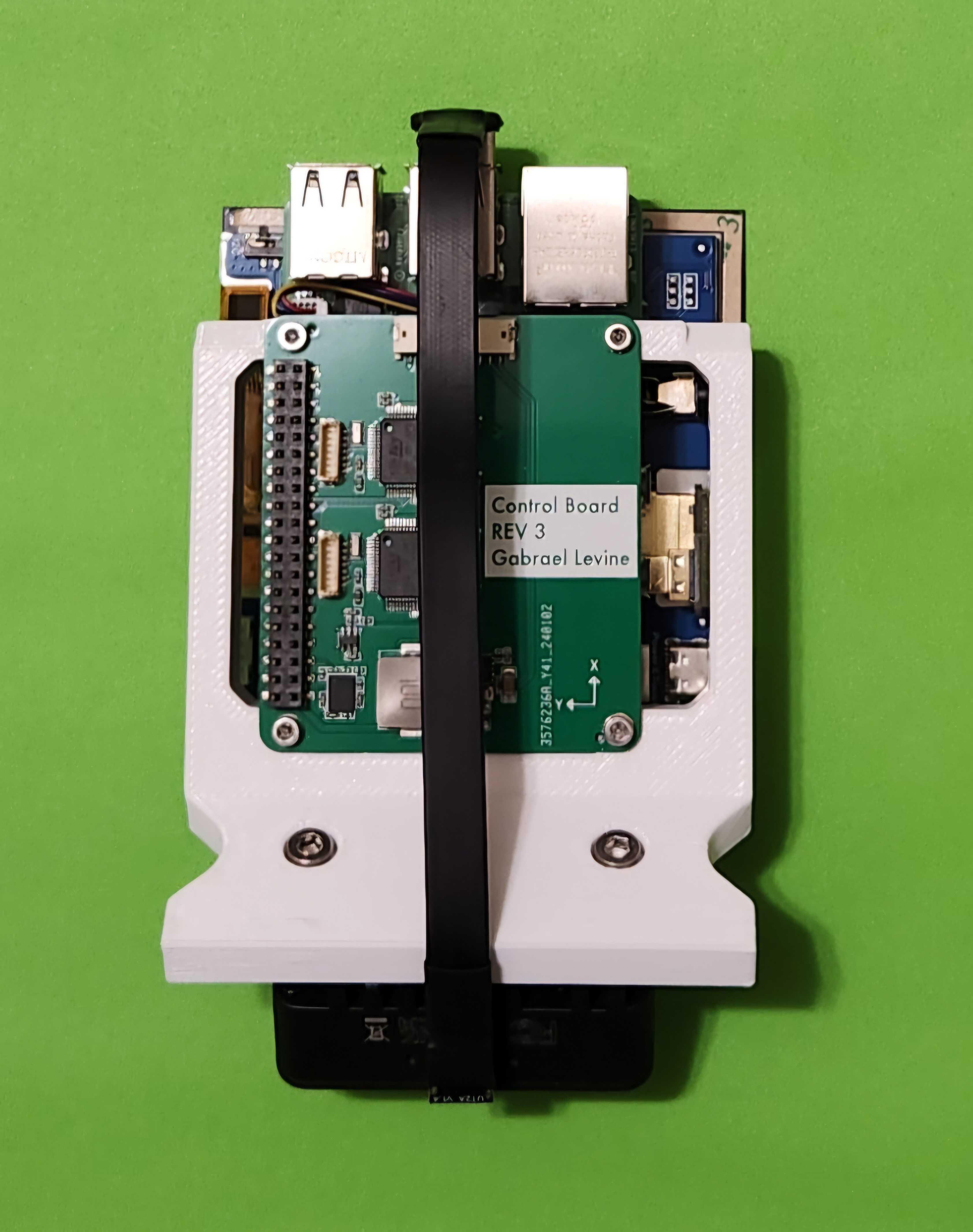
- Agile Movement: Powered by 400W brushless motors and a Raspberry Pi 5, Pupper uses reinforcement learning (RL) to navigate complex obstacles.
- Rapid Training: Through simulation, Pupper can experience three months of training in just one hour by simulating thousands of environments simultaneously.
- Safety First: Lightweight and designed with expressive features like moving ears and a high-resolution screen, Pupper is safe for use around people and children.
The Boston Build Team
Our local Pupper Project is led by a diverse group of experts and enthusiasts from various fields, including computer science, software engineering, robotics, and psychology. We are also proud to include high school interns in this project, fostering the next generation of roboticists.
Project Members
- Alan (Project Coordinator)
- Sid
- Shivam
- Krissh
- Luis
- Sabu
- High School Interns (TBD)
- Pito Salaso (BRH Leader)

Our Mission in Boston
By building Pupper v3, the Boston Robot Hackers aim to:
- Democratize Robotics: Demonstrate that high-performance, AI-driven robots can be built using open-source tools and off-the-shelf parts.
- Community Learning: Use the build process to teach foundational topics like motor control, kinematics, and visual reinforcement learning.
- Local Innovation: Experiment with modifying the Pupper code to explore new autonomous behaviors and social interactions.
Get Involved

We meet regularly at Artisans Asylum in Allston. Whether you are a professional engineer or a curious beginner, there is a place for you in our community.
- Visit Us: Check our Upcoming Meetings for hands-on hacking sessions.
- Join the Conversation: Connect with the global community on the Hands-On Robotics Discord.
- Learn More: Explore the official Stanford Pupper v3 Documentation.
"Pupper v3 is designed to spark joy and teach robotics and AI. Everything is open source, and you can build it yourself." — Stanford Pupper Project
For more updates on the Boston Pupper build, follow us at bostonrobothackers.com.