Trippy Holonomic robot
Retired
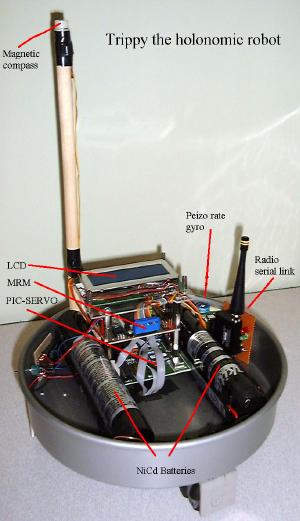
Trippy
A holonomic robot based on the Killough platform used for my Mechatronics BS degree from the U of Minnesota.
Started: 2000-2010
Team: 1 members
Lead: Alan Kilian
Software
Micrium micro C/OS-II RTOS in C.
Hardware
- Purpose: I saw a Lego robot like this and I wanted one also.
-
Controller: Mini Robo Mind from Robominds Motorola MC68332 processor. I am using the PIC-SERVO PID motion controllers from J R Kerr for doing the motion control of the three motors.
-
Software Development Environment/Methods: I have a forward kinematic simulator based on some equations that the local Math guy came up with so I can enter in the speeds of the three motors, and see how the platform would move.
-
I can compile C programs using GCC on a RedHat Linux box and download to the FLASH on the MRM. I am using the motorobots library also.
- Sensors: Rate gyro from hobby airplane. Dinsmore 1525 analog compass, Gyration MG100 rate gyro.
- Actuators: Three holonomic wheel platform.
- Height, width, length: About 10 Inches diameter and 10 Inches tall
- Weight: Several pounds.
- Power source: Two Makita NiCd 9.6 Volt packs with 5 Volt regulator.
- Speed: Pretty slow. Maybe 0.5 Feet-per-second?
- Construction history: See: Trippy progress page at: http://bobodyne.com/web-docs/robots/Trippy/index.html